2016 USF Robocup Competition Team
Helped with designing the PCB used to control the robot.
Helped with designing the PCB used to control the robot.
| 2016_-_robobulls-2016-robocup.pdf |

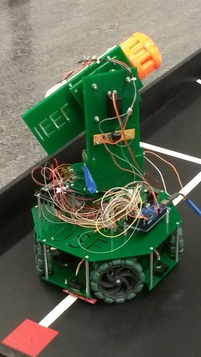
IEEE Region 3 Southeastcon 2014 - Hardware Competition - Lexington, KY
The goal is to design and build an autonomous robot that has the ability to manuever around a field following a white line, stop on top of 3 green firing blocks located throughout the field, turn and shoot a dart through a hoop. Then it has to find the red block which is the stopping point as fast as it possibly can.
The goal is to design and build an autonomous robot that has the ability to manuever around a field following a white line, stop on top of 3 green firing blocks located throughout the field, turn and shoot a dart through a hoop. Then it has to find the red block which is the stopping point as fast as it possibly can.
IEEE Region 3 Southeastcon 2013 - Hardware Competition - Jacksonville, FL
The goal was to engineer and build an autonomous robot that has the ability to go through a field finding blocks of different colors and lengths. Then it has to have the
The goal was to engineer and build an autonomous robot that has the ability to go through a field finding blocks of different colors and lengths. Then it has to have the
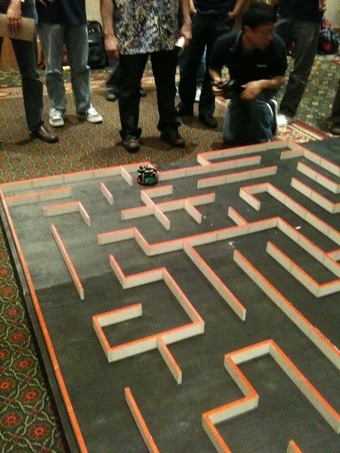
IEEE Micromouse 2012 - Region 6 SW section - San Diego, CA
Micromouse is a competition to build an autonomous robot that has the ability to manuver through a maze of walls, and the end goal is to find the center. Once the center has been found, it needs to be able to find the fastest route to the center and then once it knows that, to go straight to the center as fast as it possibly can.
Micromouse is a competition to build an autonomous robot that has the ability to manuver through a maze of walls, and the end goal is to find the center. Once the center has been found, it needs to be able to find the fastest route to the center and then once it knows that, to go straight to the center as fast as it possibly can.
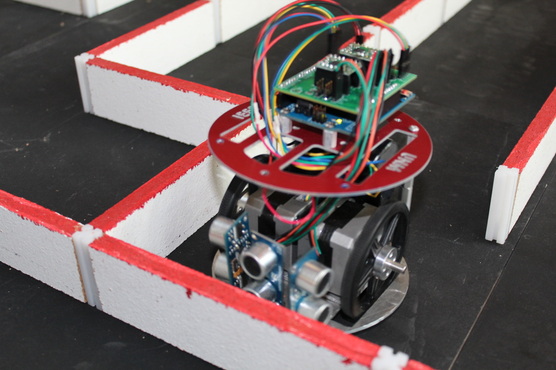
IEEE Micromouse 2011 - Region 6 SW section - Phoenix, AZ
Micromouse is a competition to build an autonomous robot that has the ability to manuver through a maze of walls, and the end goal is to find the center. Once the center has been found, it needs to be able to find the fastest route to the center and then once it knows that, to go straight to the center as fast as it possibly can.
Micromouse is a competition to build an autonomous robot that has the ability to manuver through a maze of walls, and the end goal is to find the center. Once the center has been found, it needs to be able to find the fastest route to the center and then once it knows that, to go straight to the center as fast as it possibly can.